회전운동(rotation)
회전하는 물체를 다루는 이야기를 시작하려합니다. 먼저, 회전문제를 처음접하는 분에게 지금까지 배웠던 내용들을 통해서는 풀 수 없는 문제들이 많이 있다는 것을 알려드리려고 합니다. 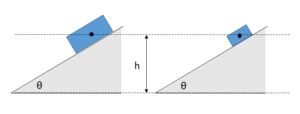 그림 1 이전까지 배운 지식을 동원하면 그림 1 과 같이 질량이 같은 물체(심지어 질량이 달라도)는 비탈면에서 미끄러져 내려오면 비탈면 끝에서는 그 모양에 상관없이 속력이 같습니다.
그림 1 이전까지 배운 지식을 동원하면 그림 1 과 같이 질량이 같은 물체(심지어 질량이 달라도)는 비탈면에서 미끄러져 내려오면 비탈면 끝에서는 그 모양에 상관없이 속력이 같습니다. 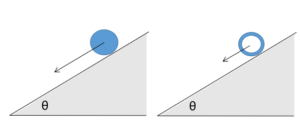 그림 2 하지만, 그림 2와 같이 둥근 물체라면 비탈면을 굴러서 내려오면 물체의 질량이 같더라도 비탈면 끝에서의 물체의 속도가 다릅니다. 지금까지 배웠던 내용만으로는 쉽게 이해가 되지 않을 것입니다. ( 그림2는 대학 물리/일반물리 회전 부문의 가장 마지막 부분에서 다룹니다.)
그림 2 하지만, 그림 2와 같이 둥근 물체라면 비탈면을 굴러서 내려오면 물체의 질량이 같더라도 비탈면 끝에서의 물체의 속도가 다릅니다. 지금까지 배웠던 내용만으로는 쉽게 이해가 되지 않을 것입니다. ( 그림2는 대학 물리/일반물리 회전 부문의 가장 마지막 부분에서 다룹니다.) 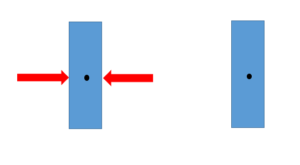 그림 3 더 단순한 문제로 그림3과 같이 양쪽에서 같은 크기의 힘을 반대방향으로 가하는 경우, 알짜힘은 0 이 되고, 물체는 움직이지 않습니다.
그림 3 더 단순한 문제로 그림3과 같이 양쪽에서 같은 크기의 힘을 반대방향으로 가하는 경우, 알짜힘은 0 이 되고, 물체는 움직이지 않습니다. 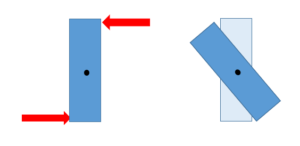 그림 4 그러나, 그림 4와 같이 힘을 가하는 지점이 다른 경우에는 물체는 회전하게 됩니다. 힘이란 용어를 처음 배울때 작용점을 배웠던 것이 기억나나요? 힘의 3요소라고 배우면서도 써먹은 기억이 없었을 것입니다. 이제서야 작용점이 중요한 것을 배우게 됩니다. > > 중학교에서 배운 것인데 까먹으셨다면 힘의 3요소 부분을 다시 확인해보시면 됩니다. 회전의 문제를 풀기 위해서 새로운 물리 법칙이 적용되는 것은 없습니다. 그러나, 이전에 배웠던 법칙들을 회전문제에 적용하려고 하면 어떻게 해야하는지 막연합니다. 그래서, 먼저 회전운동의 문제를 쉽게 해결할 수 있는 새로운 개념들을 정의하고, 그 개념들이 우리가 알고 있는 법칙에 따라 어떻게 되는가를 따져서 문제를 해결합니다. 다행히도 새로운 개념들을 정의할 때, 예전에 배웠던 개념들(속도,가속도, 질량, 힘, 운동량 등)과 유사한 관계를 갖도록 정의하였기 때문에 완전히 처음부터 배운다는 기분은 아닐 것입니다. 하지만, 비슷한 관계이긴 하지만 똑같지는 않기 때문에 오히려 더 헷갈리고 옛날에 배운 것들이 맞는지 의심이 들기도 합니다. 회전운동을 배울 때는 낯선 새로운 개념들이 많이 나오겠지만 예전에 배웠던것과 아주 유사한 구조를 가지고 있습니다. 무엇이 같고 무엇이 다른지 비교하면서 생각하는게 공부하는데 도움이 될것입니다
그림 4 그러나, 그림 4와 같이 힘을 가하는 지점이 다른 경우에는 물체는 회전하게 됩니다. 힘이란 용어를 처음 배울때 작용점을 배웠던 것이 기억나나요? 힘의 3요소라고 배우면서도 써먹은 기억이 없었을 것입니다. 이제서야 작용점이 중요한 것을 배우게 됩니다. > > 중학교에서 배운 것인데 까먹으셨다면 힘의 3요소 부분을 다시 확인해보시면 됩니다. 회전의 문제를 풀기 위해서 새로운 물리 법칙이 적용되는 것은 없습니다. 그러나, 이전에 배웠던 법칙들을 회전문제에 적용하려고 하면 어떻게 해야하는지 막연합니다. 그래서, 먼저 회전운동의 문제를 쉽게 해결할 수 있는 새로운 개념들을 정의하고, 그 개념들이 우리가 알고 있는 법칙에 따라 어떻게 되는가를 따져서 문제를 해결합니다. 다행히도 새로운 개념들을 정의할 때, 예전에 배웠던 개념들(속도,가속도, 질량, 힘, 운동량 등)과 유사한 관계를 갖도록 정의하였기 때문에 완전히 처음부터 배운다는 기분은 아닐 것입니다. 하지만, 비슷한 관계이긴 하지만 똑같지는 않기 때문에 오히려 더 헷갈리고 옛날에 배운 것들이 맞는지 의심이 들기도 합니다. 회전운동을 배울 때는 낯선 새로운 개념들이 많이 나오겠지만 예전에 배웠던것과 아주 유사한 구조를 가지고 있습니다. 무엇이 같고 무엇이 다른지 비교하면서 생각하는게 공부하는데 도움이 될것입니다
병진 운동과 회전 운동
| 지금까지 배웠던 운동들은 회전(rotation)하는 운동과 구별하여 병진(translation) 운동이라고 합니다. 지금까지는 물체가 움직이는 동안 물체의 방향이 전혀 바뀌지 않는 운동이었습니다. 이제 부터는 반대의 논리로 물체의 방향만 바뀔 뿐(회전을 할 뿐), 회전축의 위치는 전혀 변하지 않는 운동이 어떻게 되는지를 배우려고 하는 것입니다. 병진운동과 회전운동을 모두 잘 알게 되면 위치도 바뀌고 방향도 바뀌는 일반적인 물체의 운동을 잘 기술하고 설명할 수 있게 될 것입니다. 회전 운동은 상당히 어렵습니다. 팽이의 움직임을 보면 어려운 것이 보입니다. 팽이가 자기 자리에서 돌고 있지만, 그 회전축이 또 움직입니다. (세차운동, precession) 이라고 합니다. 어떤 팽이는 스스로 뒤집혀 도는 팽이도 있습니다. 이런 문제를 잘 기술하기 위해서는 생각보다 아주 복잡한 수학을 이용해야하는 등 어려운 문제가 많이 있습니다. 그래서, 대학물리(일반물리) 수준에서는 아주 한정된 범위에서만 배웁니다. 대학물리(일반물리)에서 배우는 회전 운동은 복잡한 회전운동은 배우지 않고 병진운동에서의 등가속도 직선운동과 유사한 수준으로만 배웁니다. 가장 기본적인 회전운동인 '회전축이 고정된 회전 운동'이 바로 그것입니다. 딱 여기까지만 배우고 난 뒤 병진운동과 회전 운동을 합쳐서 풀 수 있는 문제로 '미끄러지지 않는 구름(rolling without slipping)'문제(그림2 문제)를 푸는 법을 배웁니다. 회전축이 고정된 회전운동을 배우는 순서도 등가속도 직선운동이라는 병진운동을 배우는 것과 같은 순서에 있고 서로 대응되는 관계를 가지고 있습니다. 뿐만 아니라 주어진 관계식도 등가속도 직선운동과 비슷하게 생겼습니다. 이 두 운동을 비교하여 표로 나타내는 아래와 같습니다. 아주 유사하지만 식에서 드러나지 않는 차이점도 있습니다. 등가속도 직선운동과 회전축이 고정된 회전운동의 방정식 등가속도 직선운동 | 모르는 량 | 모르는 량 | 회전축이 고정된 회전 |
|---|---|---|---|
| v = v_0+at | x-x_0 | \theta - \theta_0 | \omega = \omega_0 +\alpha t |
| x-x_0 = v_0 t + \frac{1}{2}at^2 | v | \omega | \theta-\theta_0 = \omega_0 t + \frac{1}{2}\alpha t^2 |
| x-x_0 = v t - \frac{1}{2}at^2 | v_0 | \omega_0 | \theta-\theta_0 = \omega t - \frac{1}{2}\alpha t^2 |
| x-x_0 = \frac{1}{2}(v_0 + v)t | a | \alpha | \theta-\theta_0 = \frac{1}{2}(\omega_0 + \omega)t |
| v^2 = v_0^2 + 2a(x-x_0) | t | t | \omega^2 = \omega_0^2 + 2\alpha(\theta-\theta_0) |
| 병진운동 | 회전운동 | ||
| --- | --- | --- | --- |
| 위치 | x | 각 | \theta |
| 속도 | v=\frac{dx}{dt} | 각속도 | \omega=\frac{d\theta}{dt} |
| 가속도 | a =\frac{dv}{dt} | 각가속도 | \alpha= \frac{d\omega}{dt} |
| 질량 | m | 관성모멘트 | I |
| 힘 | F | 돌림힘(토크) | \tau |
| 뉴턴의 2법칙 | F=ma | 뉴턴의 2법칙 | \tau=I\alpha |
| 일 | W= \int F dx | 일 | W= \int \tau d\theta |
| 일률 | P = Fv | 일률 | P=\tau\omega |
| 운동에너지 | K=\frac{1}{2}mv^2 | 운동에너지 | K=\frac{1}{2}I\omega^2 |
| 운동량 | p=mv | 각운동량 | L=I\omega |
| 다음 주제로 회전축이 고정된 회전운동(회전운동에 사용되는 변수들) 에 관한 글을 올렸습니다. |